


Free Delivery
For all oders over $200
Safe Payment
100% secure payment
Shop With Confidence
If goods have problems
24/7 Help Center
Dedicated 24/7 support
Friendly Services
Ticket support
New Products
No product at this time
Featured Products


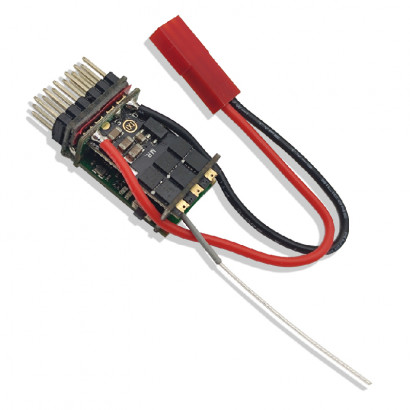
MXO-RACING ERUN-20A Brushless ESC/20A Brushless ESC
Brands: MXO-RACING
$25.99
ERUN-20A is an ultra-small sensorless brushless ESC for RC cars. Its volume is much smaller than similar products, so users can easily install it on 1/28~1/24 RC cars.
30mm EDF motor aircraft model fixed-wing 30mm ducted fan aircraft model
$15.80
15.8 USD per pair (one on each side)

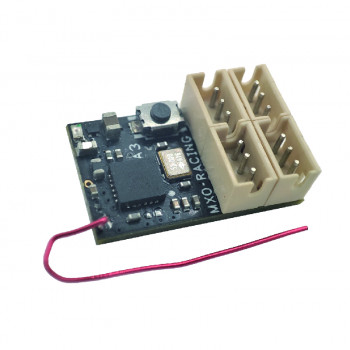
MXO-RACING RXC52-X Series Super Micro SurfaceRX/4CH/MINIZ/ATM/DRZ/GL
Brands: MXO-RACING
$39.99
The first micro surface rx with an antenna-less version that integrates a transponder with editable personal ID number.(Paid to unlock,Unlocking requires the use of the MX USB PG-ISP compiler, which needs to be purchased separately.)
You can also directly purchase the RXC52 receiver with unlocked TP function.click to jump

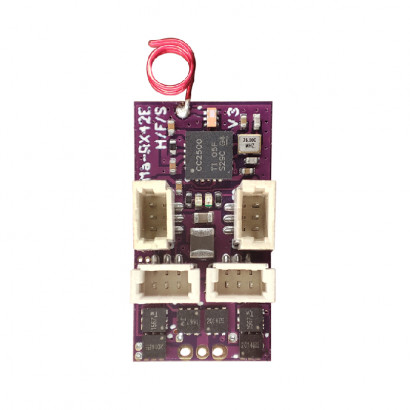
CROSSOVER-RX Ma-RX62HE Series Built-in brushless ESC/7CH MicroRX/TELEM(option)
Brands: CROSSOVER-RX
$25.99
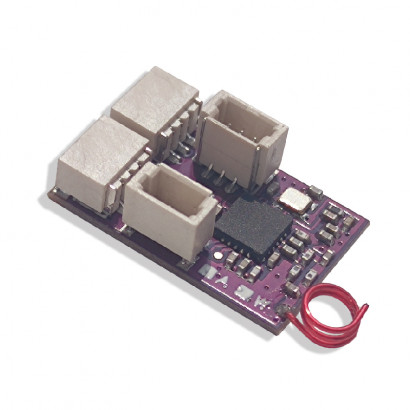
Ma-RX62HE-X series receivers were developed upon Ma-RX42E-X series receivers, with a built-in 7A/2S(5A/3S) brushless ESC and 6 independent servo ports on board, in this case, RX62HE-X receiver can provide more power and more channels to work on larger size or more complicated model planes. We can supply 8 versions in total with TELEM function.

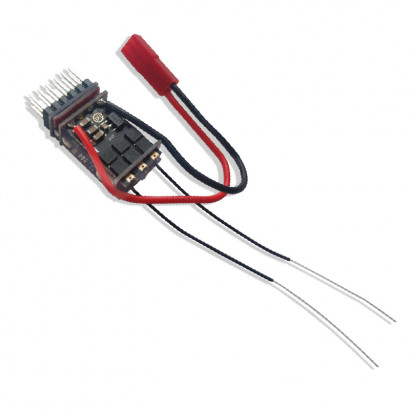
MXL-RX62H Series Receivers/linear servos/Built-in brushed ESC/TELEM(option)/SR3X(option)/GYRO/mini RC model aircrafts
Brands: CROSSOVER-RX
$32.99
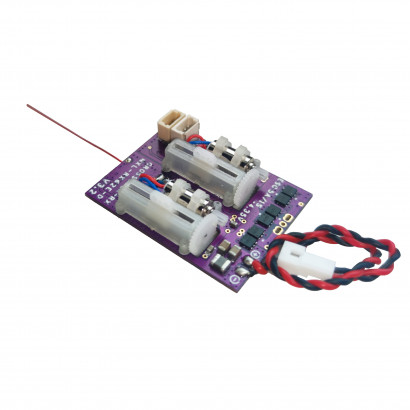
MXL-RX62H Series is serial compatible receivers specially designed for mini RC model aircrafts. two linear servos are integrated on board, two independent ports for output., one output port for integrated brushed 3A speed controller, one signal port for brushed ESC.
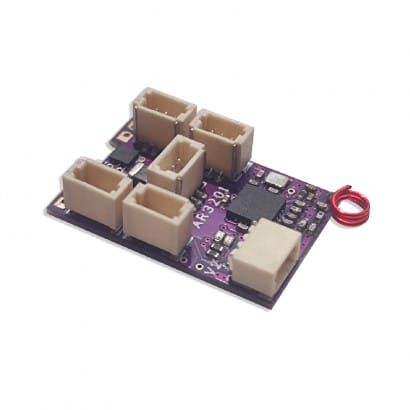
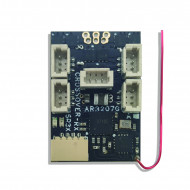
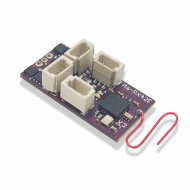
CROSSOVER-RX AR3207G Series Built-in brushless ESC/GYRO/SR3X/7CH MicroRX/TELEM
Brands: CROSSOVER-RX
$38.99
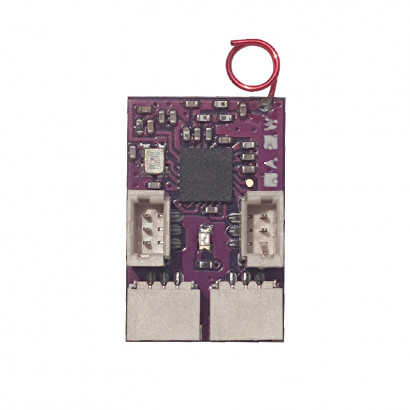
The old AR3207G-D uses a black PCB board, and the silk screen is AR3207G. The new AR3207G-D uses a purple PCB board, and the silk screen is Ma-RX62HE-D. This is because the new AR3207G-D and the new Ma-RX62HE -D shares a set of PCB boards. The hardware difference is that AR3207G-D has one more gyroscope chip and some resistors and capacitors than Ma-RX62HE-D.
Now we are selling the new AR3207G-D, we would like to inform you to avoid misunderstanding.

CROSSOVER RX FR7012 Series 7CH Receiver with 2-3S ESC/TELEM/Brushless ESC/500-700M/F3P
Brands: CROSSOVER-RX
$28.99
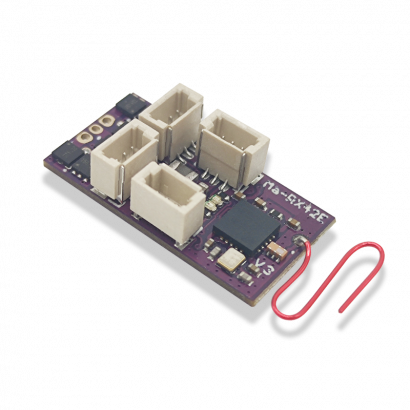
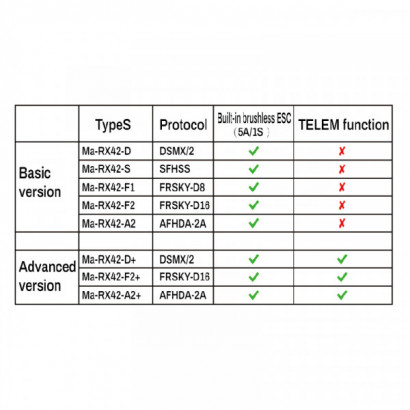
CROSSOVER-RX Ma-RX42 V2 Series Receivers 5CH MicroRX/TELEM(option)
Brands: CROSSOVER-RX
$16.99
MA-RX42-X V2 series of receivers are upgraded from the old version(2016), smaller and more stable with additional TELEM function. It still provides 4 independent output ports and 1 integrated 5A/1S brush ESC. We can supply up to 8 types of V2 receivers
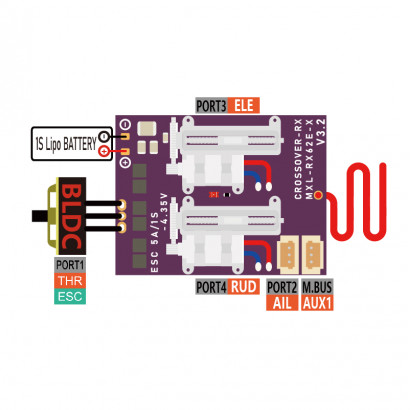
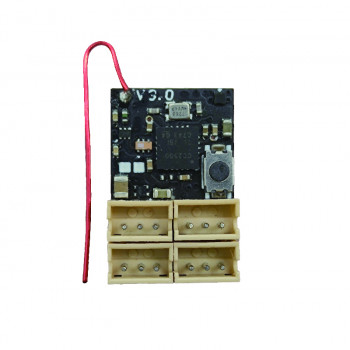
MXL-RX62E Series Receivers/linear servos/Built-in brushless ESC/TELEM/SR3X(option)/GYRO(option)/5CH/mini RC model aircrafts
Brands: CROSSOVER-RX
$38.99
MXL-RX62E-X V3.1 series receivers are developed on the basis of MXL-RX62H-X V3.0, on which are integrated with 5A/1S brushless ESC, the length of the board is only 8.2mm longer than that of MXL-RX62H board, in this case, MXL-RX62E-X receiver also can be installed on micro model airplanes very easily and bring customer brushless flight fun. Besides, some versions of MXL-RX62E-X supports TELEM function. We can supply 4 versions in total at present.

CROSSOVER RX FR7018T Series 7CH Receiver with 2-3S ESC/TELEM/Brushless ESC/1000-1500m/F3P
Brands: CROSSOVER-RX
$41.99



CROSSOVER-RX AR3201/ AR3201G V2.0 Built-in2 brushed ESCs/6CH MicroRX/TELEM/GYRO(option)/SR3X 3-axis(option)
Brands: CROSSOVER-RX
$23.99
AR3201/AR3201G is a kind of highly integrated receiver(built-in two brush 5A ESCs, one receiver, SR3X 3-axis(option), DCDC-5A/1A boosting power). It is very helpful for DIY or rebuilding model airplanes weight between 25-100g.
Click here to buy more servos!

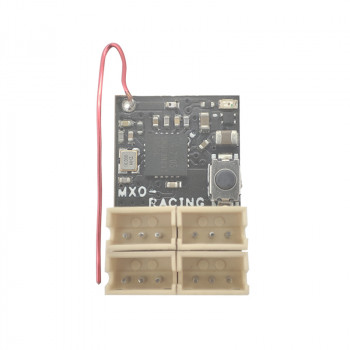
MXO-RACING RXC52-X&TP Series Super Micro SurfaceRX/4CH/MINIZ/ATM/DRZ/GL/Transponder
Brands: MXO-RACING
$49.90
Bestseller Products
MXO-RACING RXC52-X&TP Series Super Micro SurfaceRX/4CH/MINIZ/ATM/DRZ/GL/Transponder
Brands: MXO-RACING
$49.90

MXO-RACING RXC42-A3(NB4) V2 Super Micro SurfaceRX/4CH/MINIZ/ATM/DRZ/GL
$38.99
This RC receiver unit is Flysky Noble NB4 compatible. It offers full 4-channel support in ultra-light weight and micro size. It is designed for micro racing cars.

CROSSOVER-RX AR3201/ AR3201G V2.0 Built-in2 brushed ESCs/6CH MicroRX/TELEM/GYRO(option)/SR3X 3-axis(option)
Brands: CROSSOVER-RX
$23.99
AR3201/AR3201G is a kind of highly integrated receiver(built-in two brush 5A ESCs, one receiver, SR3X 3-axis(option), DCDC-5A/1A boosting power). It is very helpful for DIY or rebuilding model airplanes weight between 25-100g.
Click here to buy more servos!
MXL-RX62H Series Receivers/linear servos/Built-in brushed ESC/TELEM(option)/SR3X(option)/GYRO/mini RC model aircrafts
Brands: CROSSOVER-RX
$32.99
MXL-RX62H Series is serial compatible receivers specially designed for mini RC model aircrafts. two linear servos are integrated on board, two independent ports for output., one output port for integrated brushed 3A speed controller, one signal port for brushed ESC.
CROSSOVER-RX AR3207G Series Built-in brushless ESC/GYRO/SR3X/7CH MicroRX/TELEM
Brands: CROSSOVER-RX
$38.99
The old AR3207G-D uses a black PCB board, and the silk screen is AR3207G. The new AR3207G-D uses a purple PCB board, and the silk screen is Ma-RX62HE-D. This is because the new AR3207G-D and the new Ma-RX62HE -D shares a set of PCB boards. The hardware difference is that AR3207G-D has one more gyroscope chip and some resistors and capacitors than Ma-RX62HE-D.
Now we are selling the new AR3207G-D, we would like to inform you to avoid misunderstanding.
MXL-RX62E Series Receivers/linear servos/Built-in brushless ESC/TELEM/SR3X(option)/GYRO(option)/5CH/mini RC model aircrafts
Brands: CROSSOVER-RX
$38.99
MXL-RX62E-X V3.1 series receivers are developed on the basis of MXL-RX62H-X V3.0, on which are integrated with 5A/1S brushless ESC, the length of the board is only 8.2mm longer than that of MXL-RX62H board, in this case, MXL-RX62E-X receiver also can be installed on micro model airplanes very easily and bring customer brushless flight fun. Besides, some versions of MXL-RX62E-X supports TELEM function. We can supply 4 versions in total at present.

MXO-RACING RXC42-A1(FLYSKY-AFHDS-1A) V2 Super Micro SurfaceRX/4CH/MINIZ/ATM/DRZ/GL
$19.99
This RC receiver unit is FlySky AFHDS compatible. It offers full 4-channel support in ultra-light
weight and micro size. It is designed for micro racing cars.

MXO-RACING RXC42-SG(FUTABA-SFHSS) V3 Super Micro SurfaceRX/4CH/HighSpeed 3.4ms/ Built-in GYRO & LNA/MINIZ/ATM/DRZ/GL
$49.99
MXO-RACING This RC receiver unit is FUTABA-SFHSS full range of remote controls compatible. It offers full 4-channel support in ultra-light weight and micro size. It is designed for micro racing cars.


MXO-RACING RXC52-X Series Super Micro SurfaceRX/4CH/MINIZ/ATM/DRZ/GL
Brands: MXO-RACING
$39.99
The first micro surface rx with an antenna-less version that integrates a transponder with editable personal ID number.(Paid to unlock,Unlocking requires the use of the MX USB PG-ISP compiler, which needs to be purchased separately.)
You can also directly purchase the RXC52 receiver with unlocked TP function.click to jump

MXO-RACING RXC42-A2(FLYSKY-AFHDS-2A) V2 Super Micro SurfaceRX/4CH/MINIZ/ATM/DRZ/GL
$19.99
This RC receiver unit is FlySky AFHDS 2A compatible. It offers full 4-channel support in ultra-light weight and micro size. It is designed for micro racing cars.
CROSSOVER RX FR7012 Series 7CH Receiver with 2-3S ESC/TELEM/Brushless ESC/500-700M/F3P
Brands: CROSSOVER-RX
$28.99
Top Flash Deals Of The Day
Hurry Up! Offer ends in:

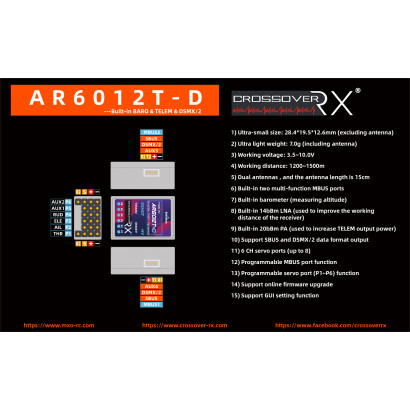
CROSSOVER-RX AR6012T-D ( DSMX/2) /Built-in BARO & TELEM & DSMX/2 & 8CH PWM or 12CH SBUS
Brands: CROSSOVER-RX
$49.99
$59.99


XR602T-S(SFHSS Futaba) SBUS/FPORT/RSSI/Full-range/D-ANT MicroFPVRX
Brands: CROSSOVER-RX
$21.99
$22.99
XR602T-S is totally new designed receive, which has a multifunctional UART port(DMA operation)for double and two-way communication, it can outpu SBUS and FPORT signal at the same time, also support RSSI output and online firmware updating. It is 100% compatible with SFHSS.
Popular Categories This Month
CROSSOVER-RX Ma-RX62HE Series Built-in brushless ESC/7CH MicroRX/TELEM(option)
Brands: CROSSOVER-RX
$25.99
Ma-RX62HE-X series receivers were developed upon Ma-RX42E-X series receivers, with a built-in 7A/2S(5A/3S) brushless ESC and 6 independent servo ports on board, in this case, RX62HE-X receiver can provide more power and more channels to work on larger size or more complicated model planes. We can supply 8 versions in total with TELEM function.
MXL-RX62H Series Receivers/linear servos/Built-in brushed ESC/TELEM(option)/SR3X(option)/GYRO/mini RC model aircrafts
Brands: CROSSOVER-RX
$32.99
MXL-RX62H Series is serial compatible receivers specially designed for mini RC model aircrafts. two linear servos are integrated on board, two independent ports for output., one output port for integrated brushed 3A speed controller, one signal port for brushed ESC.
CROSSOVER-RX AR3207G Series Built-in brushless ESC/GYRO/SR3X/7CH MicroRX/TELEM
Brands: CROSSOVER-RX
$38.99
The old AR3207G-D uses a black PCB board, and the silk screen is AR3207G. The new AR3207G-D uses a purple PCB board, and the silk screen is Ma-RX62HE-D. This is because the new AR3207G-D and the new Ma-RX62HE -D shares a set of PCB boards. The hardware difference is that AR3207G-D has one more gyroscope chip and some resistors and capacitors than Ma-RX62HE-D.
Now we are selling the new AR3207G-D, we would like to inform you to avoid misunderstanding.
CROSSOVER RX FR7012 Series 7CH Receiver with 2-3S ESC/TELEM/Brushless ESC/500-700M/F3P
Brands: CROSSOVER-RX
$28.99
CROSSOVER-RX Ma-RX42 V2 Series Receivers 5CH MicroRX/TELEM(option)
Brands: CROSSOVER-RX
$16.99
MA-RX42-X V2 series of receivers are upgraded from the old version(2016), smaller and more stable with additional TELEM function. It still provides 4 independent output ports and 1 integrated 5A/1S brush ESC. We can supply up to 8 types of V2 receivers
MXL-RX62E Series Receivers/linear servos/Built-in brushless ESC/TELEM/SR3X(option)/GYRO(option)/5CH/mini RC model aircrafts
Brands: CROSSOVER-RX
$38.99
MXL-RX62E-X V3.1 series receivers are developed on the basis of MXL-RX62H-X V3.0, on which are integrated with 5A/1S brushless ESC, the length of the board is only 8.2mm longer than that of MXL-RX62H board, in this case, MXL-RX62E-X receiver also can be installed on micro model airplanes very easily and bring customer brushless flight fun. Besides, some versions of MXL-RX62E-X supports TELEM function. We can supply 4 versions in total at present.
CROSSOVER RX FR7018T Series 7CH Receiver with 2-3S ESC/TELEM/Brushless ESC/1000-1500m/F3P
Brands: CROSSOVER-RX
$41.99
MXO-RACING RXC52-X Series Super Micro SurfaceRX/4CH/MINIZ/ATM/DRZ/GL
Brands: MXO-RACING
$39.99
The first micro surface rx with an antenna-less version that integrates a transponder with editable personal ID number.(Paid to unlock,Unlocking requires the use of the MX USB PG-ISP compiler, which needs to be purchased separately.)
You can also directly purchase the RXC52 receiver with unlocked TP function.click to jump
MXO-RACING RXC52-X&TP Series Super Micro SurfaceRX/4CH/MINIZ/ATM/DRZ/GL/Transponder
Brands: MXO-RACING
$49.90



No product at this time
MXO-RACING RXC52-X Series Super Micro SurfaceRX/4CH/MINIZ/ATM/DRZ/GL
Brands: MXO-RACING
$39.99
The first micro surface rx with an antenna-less version that integrates a transponder with editable personal ID number.(Paid to unlock,Unlocking requires the use of the MX USB PG-ISP compiler, which needs to be purchased separately.)
You can also directly purchase the RXC52 receiver with unlocked TP function.click to jump
MXL-RX62H Series Receivers/linear servos/Built-in brushed ESC/TELEM(option)/SR3X(option)/GYRO/mini RC model aircrafts
Brands: CROSSOVER-RX
$32.99
MXL-RX62H Series is serial compatible receivers specially designed for mini RC model aircrafts. two linear servos are integrated on board, two independent ports for output., one output port for integrated brushed 3A speed controller, one signal port for brushed ESC.
MXL-RX62E Series Receivers/linear servos/Built-in brushless ESC/TELEM/SR3X(option)/GYRO(option)/5CH/mini RC model aircrafts
Brands: CROSSOVER-RX
$38.99
MXL-RX62E-X V3.1 series receivers are developed on the basis of MXL-RX62H-X V3.0, on which are integrated with 5A/1S brushless ESC, the length of the board is only 8.2mm longer than that of MXL-RX62H board, in this case, MXL-RX62E-X receiver also can be installed on micro model airplanes very easily and bring customer brushless flight fun. Besides, some versions of MXL-RX62E-X supports TELEM function. We can supply 4 versions in total at present.
CROSSOVER-RX AR3201/ AR3201G V2.0 Built-in2 brushed ESCs/6CH MicroRX/TELEM/GYRO(option)/SR3X 3-axis(option)
Brands: CROSSOVER-RX
$23.99
AR3201/AR3201G is a kind of highly integrated receiver(built-in two brush 5A ESCs, one receiver, SR3X 3-axis(option), DCDC-5A/1A boosting power). It is very helpful for DIY or rebuilding model airplanes weight between 25-100g.
Click here to buy more servos!
MXO-RACING RXC52-X&TP Series Super Micro SurfaceRX/4CH/MINIZ/ATM/DRZ/GL/Transponder
Brands: MXO-RACING
$49.90
No product at this time
CROSSOVER-RX Ma-RX62HE Series Built-in brushless ESC/7CH MicroRX/TELEM(option)
Brands: CROSSOVER-RX
$25.99
Ma-RX62HE-X series receivers were developed upon Ma-RX42E-X series receivers, with a built-in 7A/2S(5A/3S) brushless ESC and 6 independent servo ports on board, in this case, RX62HE-X receiver can provide more power and more channels to work on larger size or more complicated model planes. We can supply 8 versions in total with TELEM function.
MXL-RX62H Series Receivers/linear servos/Built-in brushed ESC/TELEM(option)/SR3X(option)/GYRO/mini RC model aircrafts
Brands: CROSSOVER-RX
$32.99
MXL-RX62H Series is serial compatible receivers specially designed for mini RC model aircrafts. two linear servos are integrated on board, two independent ports for output., one output port for integrated brushed 3A speed controller, one signal port for brushed ESC.
CROSSOVER-RX AR3207G Series Built-in brushless ESC/GYRO/SR3X/7CH MicroRX/TELEM
Brands: CROSSOVER-RX
$38.99
The old AR3207G-D uses a black PCB board, and the silk screen is AR3207G. The new AR3207G-D uses a purple PCB board, and the silk screen is Ma-RX62HE-D. This is because the new AR3207G-D and the new Ma-RX62HE -D shares a set of PCB boards. The hardware difference is that AR3207G-D has one more gyroscope chip and some resistors and capacitors than Ma-RX62HE-D.
Now we are selling the new AR3207G-D, we would like to inform you to avoid misunderstanding.
CROSSOVER RX FR7012 Series 7CH Receiver with 2-3S ESC/TELEM/Brushless ESC/500-700M/F3P
Brands: CROSSOVER-RX
$28.99
CROSSOVER-RX Ma-RX42 V2 Series Receivers 5CH MicroRX/TELEM(option)
Brands: CROSSOVER-RX
$16.99
MA-RX42-X V2 series of receivers are upgraded from the old version(2016), smaller and more stable with additional TELEM function. It still provides 4 independent output ports and 1 integrated 5A/1S brush ESC. We can supply up to 8 types of V2 receivers
MXL-RX62E Series Receivers/linear servos/Built-in brushless ESC/TELEM/SR3X(option)/GYRO(option)/5CH/mini RC model aircrafts
Brands: CROSSOVER-RX
$38.99
MXL-RX62E-X V3.1 series receivers are developed on the basis of MXL-RX62H-X V3.0, on which are integrated with 5A/1S brushless ESC, the length of the board is only 8.2mm longer than that of MXL-RX62H board, in this case, MXL-RX62E-X receiver also can be installed on micro model airplanes very easily and bring customer brushless flight fun. Besides, some versions of MXL-RX62E-X supports TELEM function. We can supply 4 versions in total at present.
CROSSOVER RX FR7018T Series 7CH Receiver with 2-3S ESC/TELEM/Brushless ESC/1000-1500m/F3P
Brands: CROSSOVER-RX
$41.99
CROSSOVER-RX AR3201/ AR3201G V2.0 Built-in2 brushed ESCs/6CH MicroRX/TELEM/GYRO(option)/SR3X 3-axis(option)
Brands: CROSSOVER-RX
$23.99
AR3201/AR3201G is a kind of highly integrated receiver(built-in two brush 5A ESCs, one receiver, SR3X 3-axis(option), DCDC-5A/1A boosting power). It is very helpful for DIY or rebuilding model airplanes weight between 25-100g.
Click here to buy more servos!
CROSSOVER-RX AR6012T-D ( DSMX/2) /Built-in BARO & TELEM & DSMX/2 & 8CH PWM or 12CH SBUS
Brands: CROSSOVER-RX
$49.99
$59.99


CROSSOVER-RX AR9012T-D ( DSMX/2) /Built-in BARO & TELEM & DSMX/2 & 10CH PWM or 12CH SBUS
Brands: CROSSOVER-RX
$79.99

XR602T-A(AFHDS-2A FLYSKY) SBUS/FPORT/RSSI/Full-RFPower/TELEM/D-ANT MicroFPVRX
Brands: CROSSOVER-RX
$22.99
XR602T-A is totally new designed receiver supports telemetry, which has a multifunctional UART port(DMA operation) for double and two-way communication, it can outpu SBUS and FPORT signal at the same time, also support RSSI output and online firmware updating. It is 100% compatible with FLYSKY AFHDS-2A.
XR602T-S(SFHSS Futaba) SBUS/FPORT/RSSI/Full-range/D-ANT MicroFPVRX
Brands: CROSSOVER-RX
$21.99
$22.99
XR602T-S is totally new designed receive, which has a multifunctional UART port(DMA operation)for double and two-way communication, it can outpu SBUS and FPORT signal at the same time, also support RSSI output and online firmware updating. It is 100% compatible with SFHSS.













{kind=link}